


天气模式

飞行模拟仿真
随着多元化客户需求来临,国产化自主研发成为了行业发展的新趋势
所属分类:
核心产品
关键词:
赛四达
仿真训练
详细介绍
产品介绍
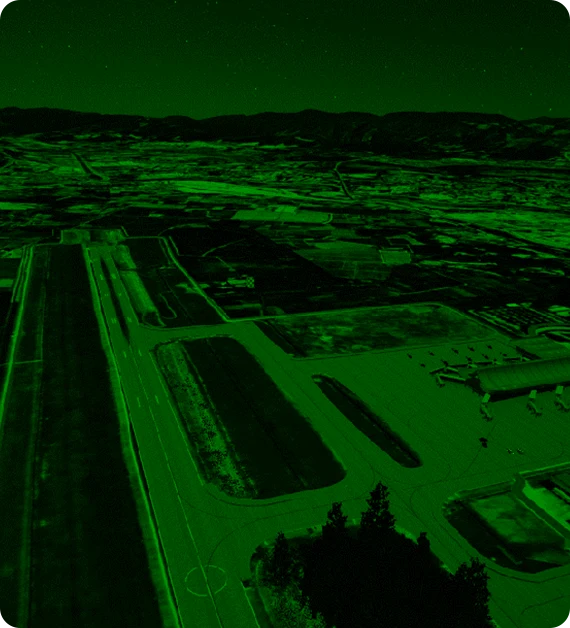
● 可见光/微光夜视/红外成像系统 (IG)
● 气象雷达仿真软件
● 多通道实像显示系统、虚像显示系统、LED球幕显示系统
● 接口采集、航电显控、飞控飞仿、教员台、综合环境、操纵负荷
● 综合战场环境与计算机兵力生成技术
● 装备虚拟协同训练、维修、维护系统
自研产品介绍
imageENGINE 三维图形生成系统:


imageENGINE(iENGIN) 图形引擎是赛四达经过多年自主研发的三维图形引擎,iENGIN图形引擎拥有全球范围的GIS数据加载能力,支持加载网络与本地瓦片数据;图像渲染过程使用光线追踪算法与PBR材质相结合的方式提供电影级渲染效果;使用粒子系统实现雨、雪、特效等,为用户提供效果真实的、响应迅速的三维图形渲染效果。
技术特点
√ 全球数据库,支持采用WGS84坐标系;
引擎使用WMTS服务,具备调度T级别地形数据库的能力,结合LOD动态加载算法,可根据视点位置自动调节显示的地形级别, 在内存占用极小的情况下渲染高精度地形。




√ 采用PBR和实时光照技术的光影效果;
iENGIN在动态管线的基础上增加光线的追踪计算模型,结合PBR材质和深度度、雾参数等信息,动态计算光影效果,提高场景渲染的细腻程度和真实感。



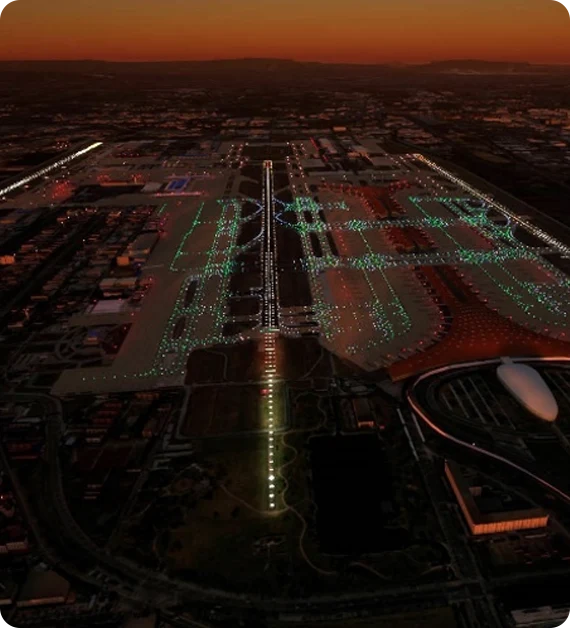

√ 可实现复杂的多种光点的状态
通过光点的定义文件,指定了颜色、角度、强度这些信息,实时计算每个光点对每个像素的影响,从而让三维场景支持真实的光点效果。




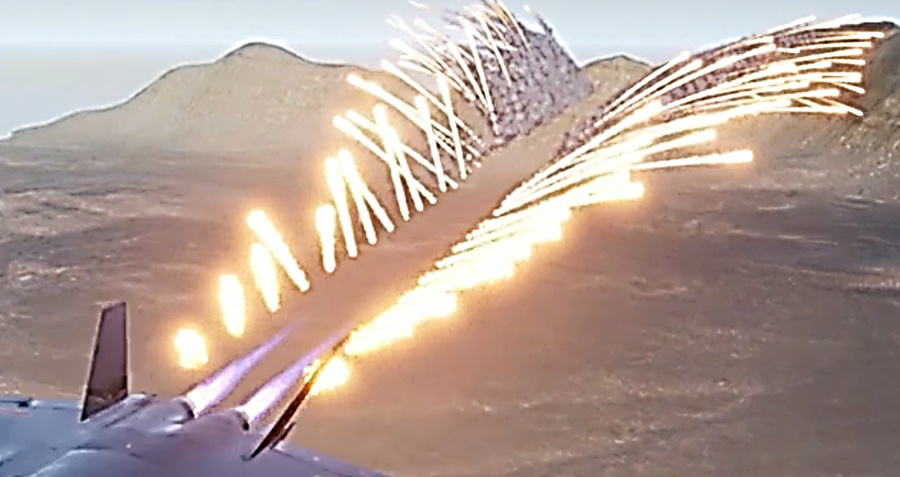
√ 使用粒子系统和材质来实现飞机尾焰、导弹尾迹、干扰弹、燃烧及爆炸等特殊效果。


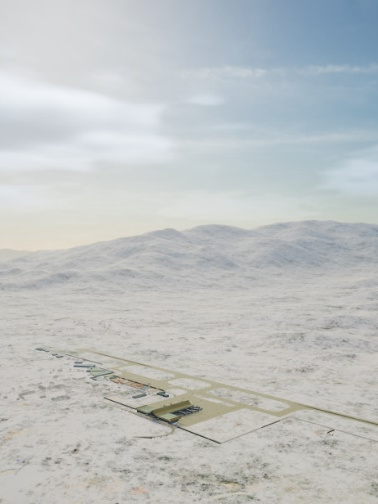
√ 支持四季的实时切换,包括实时的积雪、积水效果等。可切换云、雨、雪、地雾、能见度、风暴云等 复杂气象模拟;




√ 内置集成MR眼镜驱动和扩展接口,对于市面上常见的MR眼镜,可直接接入使用;同时提供扩展接口,通过简单编程也可轻松的接入定制眼镜产品。


Image Dome – CPD 虚像显示系统
系统采用多台投影机,正投于背投屏,经过一次透射后,在反射镜上拼接成一幅连续的有一定景深的画面。
技术特点:
• 3米半径,水平200°,垂直40° (目前) ;
• 专业的结构设计能力(结合光路设计、强度/寿命计算、工艺要求等);
• 专业的安装调试队伍。

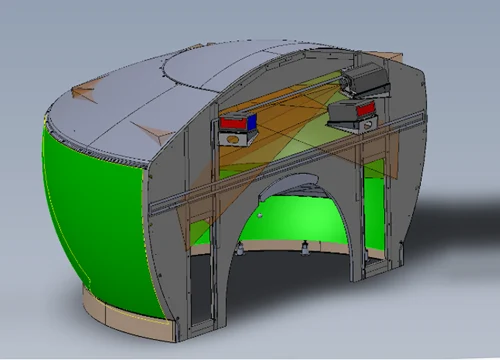
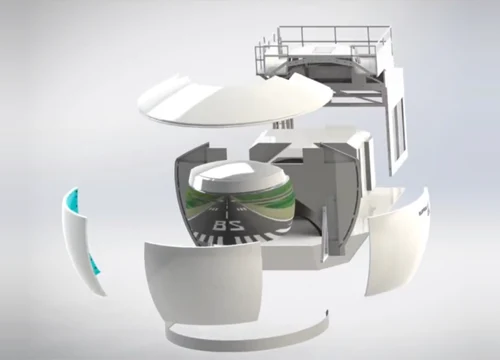
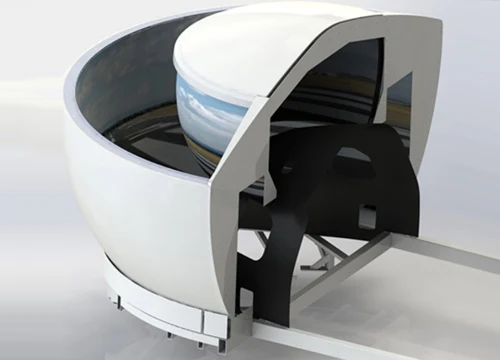
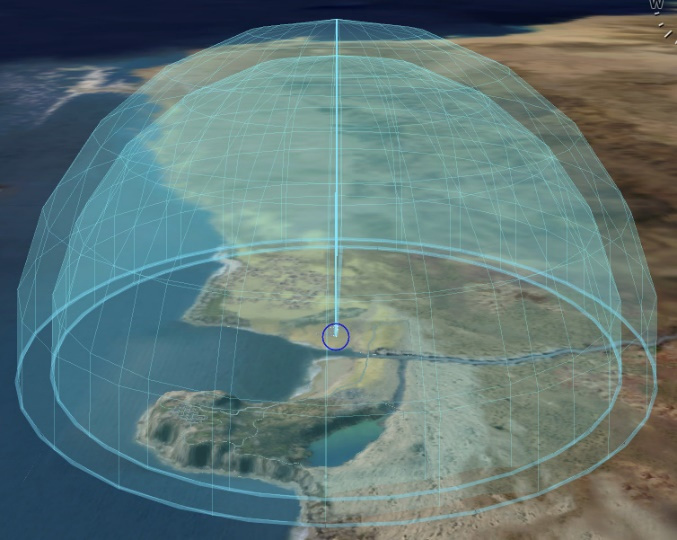
Image WR 气象雷达仿真系统
系统可以模拟飞机前方的降水、湍流情况,并用不同的颜色来表示降水的密度和地形情况。系统还具有预测风切变功能,可以探测飞机前方风切变情况。
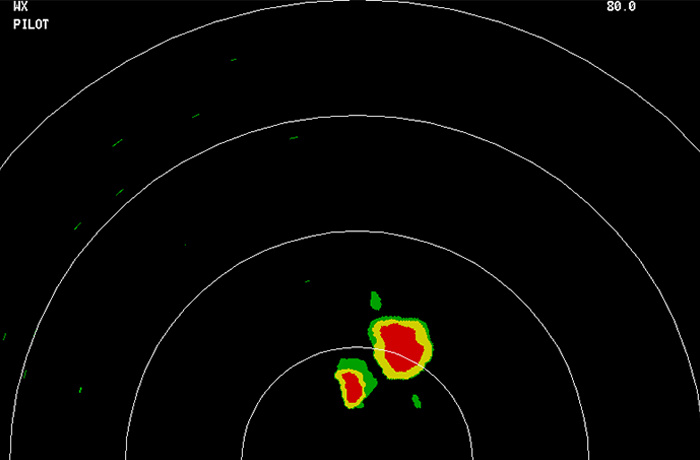
风切变叠加天气模式
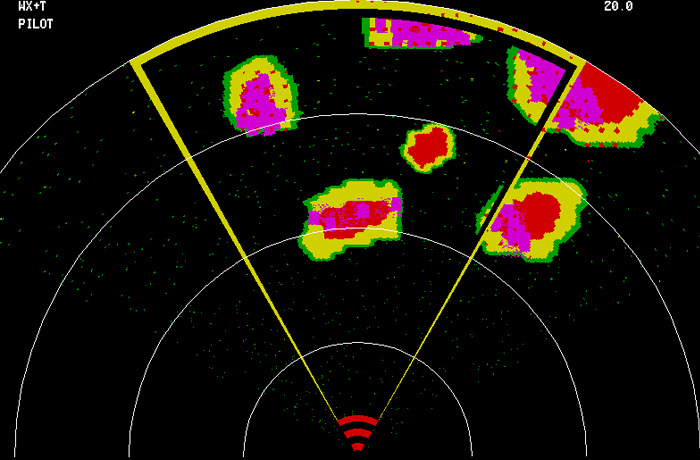
风切变模式
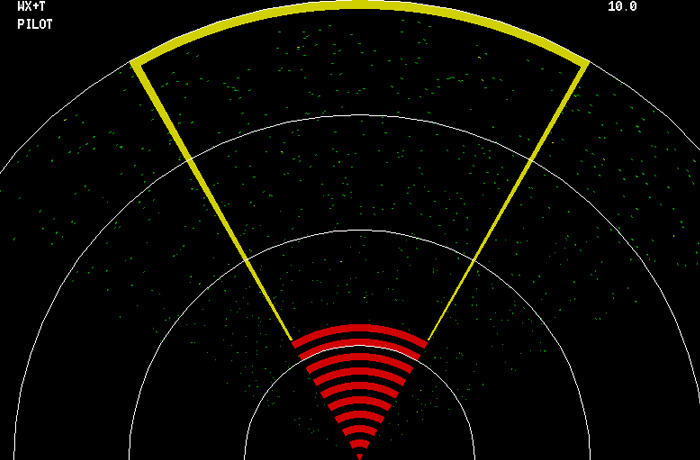
Image Dome – FPD 正投实像显示系统
系统采用多台投影机,正投于球幕内表面,拼接成一幅连续的画面。
技术特点:
• 专业的光路设计能力
• 专业的结构设计能力(强度及应力分析)
• 专业的安装调试队伍。
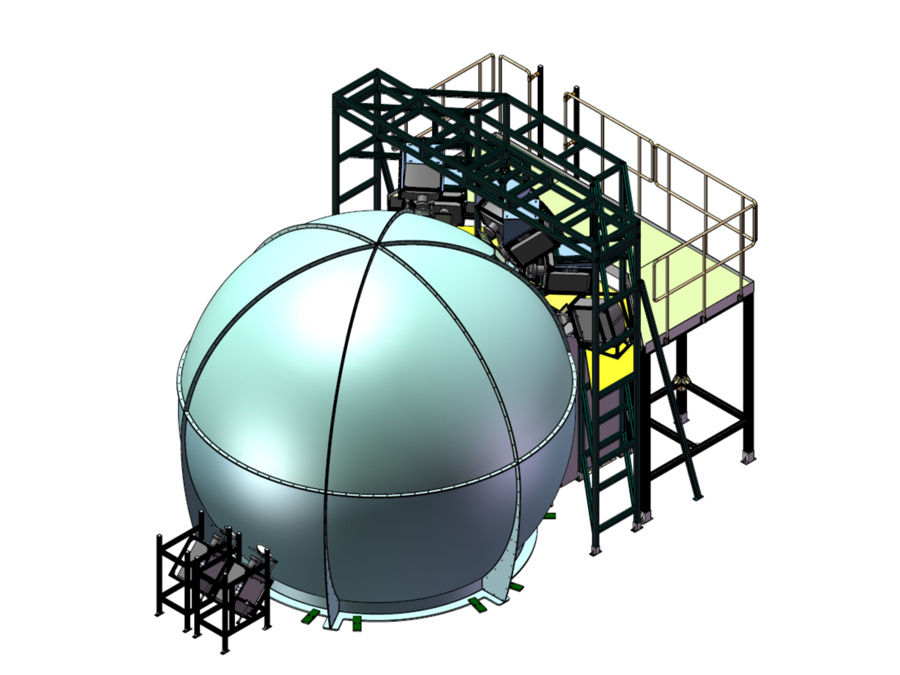

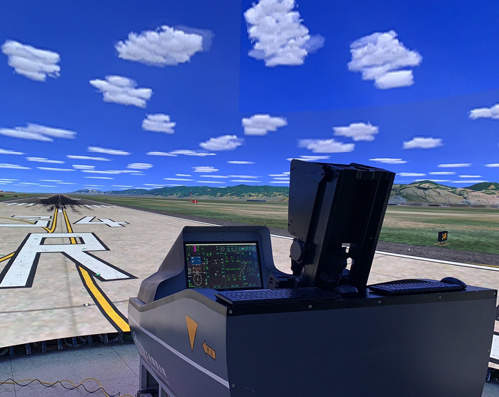
Image Dome – LED LED显示系统
系统采用多块LED面板,采用经纬分割方式拼接成球幕。
技术特点:
• 2.5米半径(目前最小半径);
• 视场角没有座舱以及投影机约束;
• 亮度、对比度高,同时可调整范围大(特别是在夜晚,更加接近真实世界)
• 像素利用率高,显示系统分辨率高(传统投影系统由于光路遮挡或者投影机摆放位置会造成浪费)
• 全国产
接口采集系统
技术特点:
自主研发的接口采集系统,采用了先进电子技术和模块化设计思想,具有集成度高、性能稳定、连续工作时间长等特点。该系统可以兼容429、CAN、Beckhoff等接口总线,适用性广。
技术参数:
数据更新周期 ≮10ms
数据传输带宽 115200bps
模拟量输入电压 ±10VDC模拟量输入分辨率
12位模拟量输入精度 >0.024%
系统稳定工作电压 18VDC~32VDC

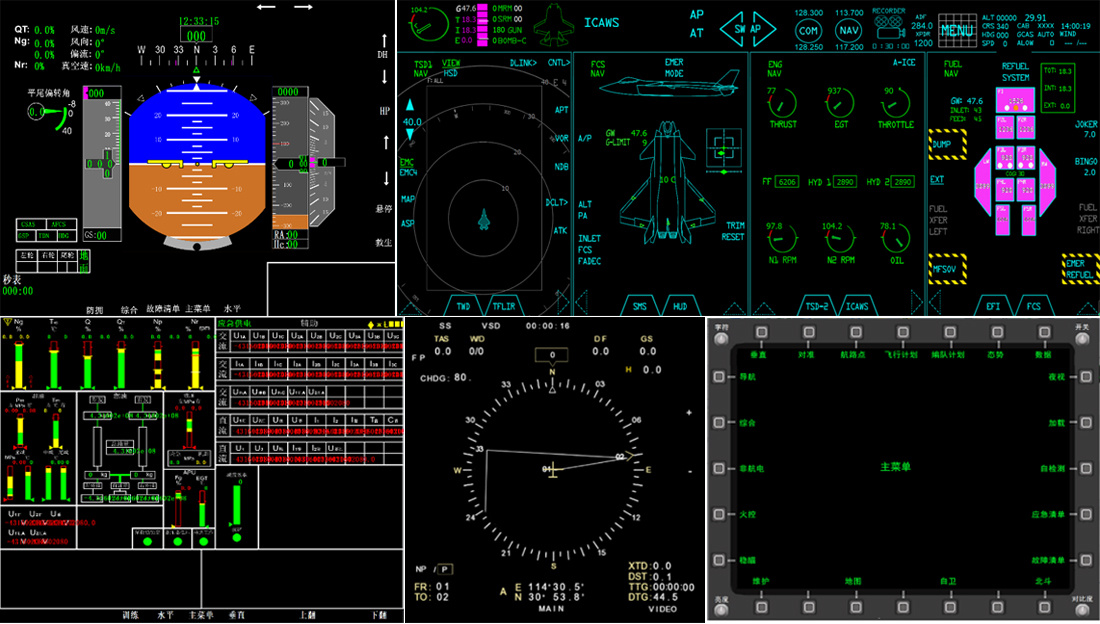
综合航电显控仿真软件
技术特点:
综合航电显控仿真软件可模拟多型号飞行器航电系统和显控系统,完全配适国产操作系统,通过计算机仿真技术对飞行器的飞行状态、航行参数和仪表显示等进行模拟,以实现对飞行操纵和控制过程的仿真与测试。
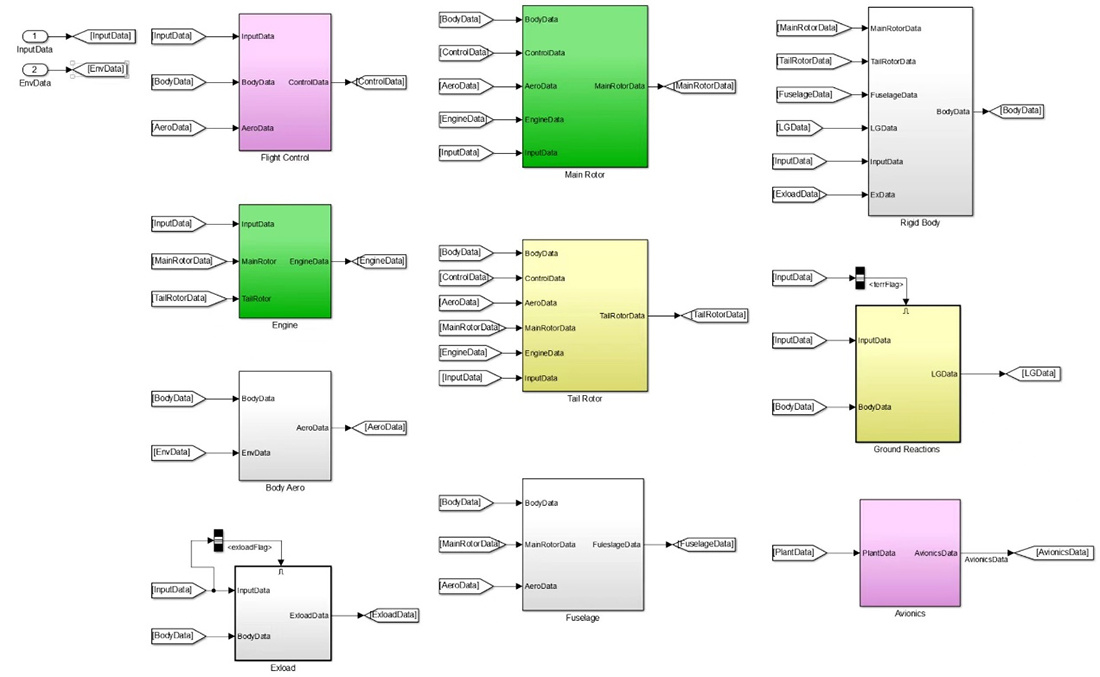
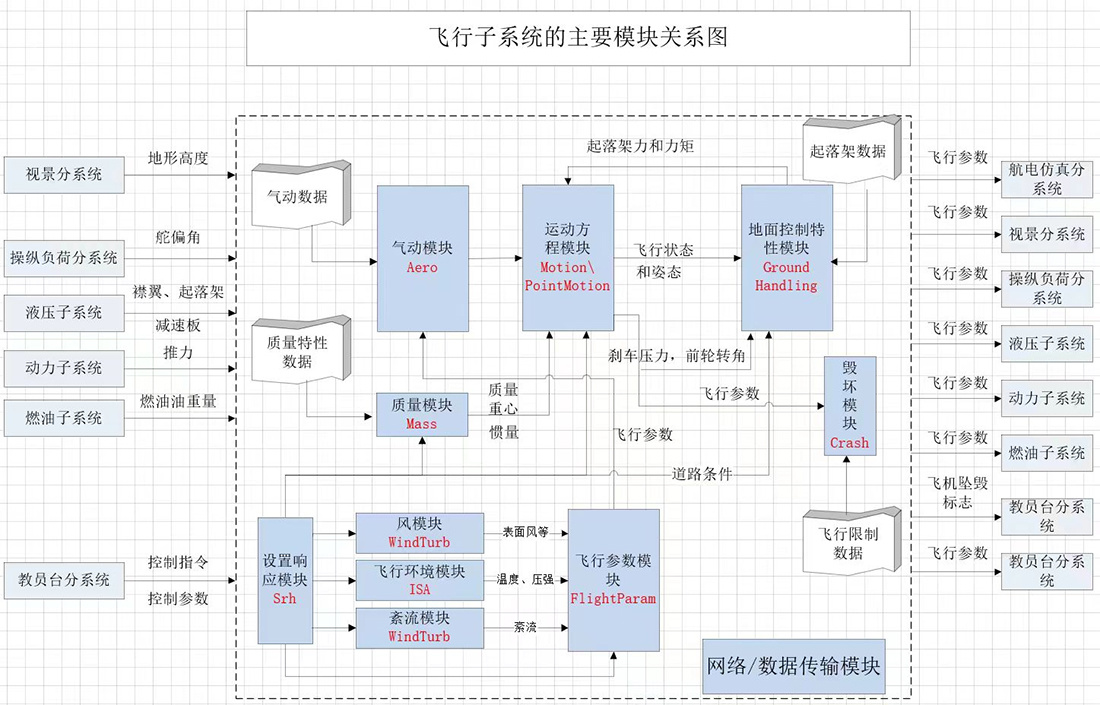
旋翼/固定翼飞行仿真平台:
技术特点:
• 对飞控、气动、旋翼等模型分类建立; 逻辑和界面分层设计;
• 可通过修改各类模型配置参数来调整仿真模型;
• 图形可视化便于调参;
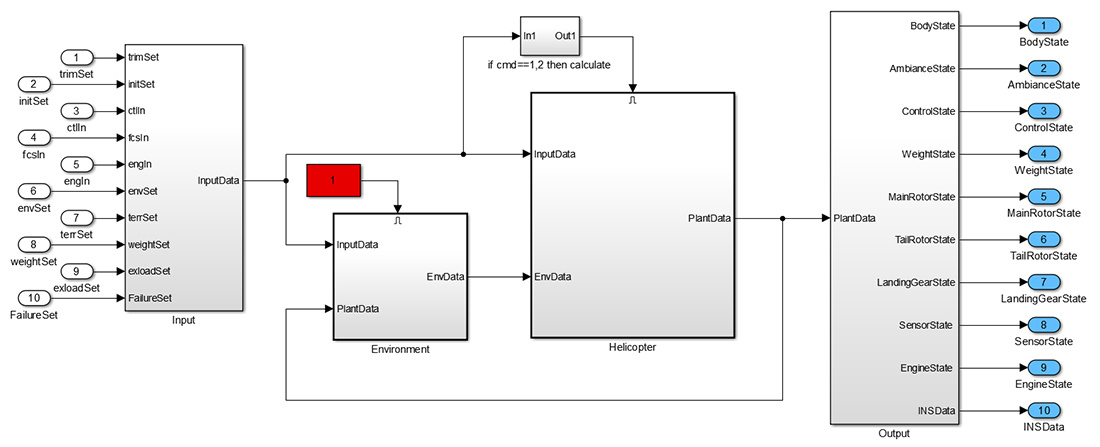
旋翼/固定翼飞控仿真平台:
教员控制台系统:
技术特点:
• 数据、逻辑和界面分层设计;
• 强大的底层引擎设计,通过修改配置文件来定制页面功能;
• 训练科目及内容可编辑能根据新的训练需求设定新的训练科目,操作简单;
• 故障预设,满足条件自动触发故障;
• 训练记录及回放
• 可对训练器软硬件设备进行管理和控制,能够监测控制当前计算机的连接状态;
• 输入数值范围有提示,同时给出缺省数值

综合环境系统:
技术特点:
• 大气环境模拟;
高精度模拟气压/温度变化、及紊流/阵风等对飞机的影响效果
• 目标环境模拟;
固定目标环境的二维、三维几何尺寸、材质、电磁特性活动目标的预编程序控制 及人工实时控制
• 电磁环境模拟;
模拟多类型地面、空中辐射源的位置、数量及其辐射功率、天线增益以及频率、脉宽、波形等信号特征
• 二维/三维态势显示;


操纵负荷系统
技术特点:
• 大力矩输出;
• 高动态响应和静态负载刚性;
• 低转动惯量;
• 简化系统机械设计,外形紧凑;
• 高定位精度;

序号 | 型号 | SSCL300 |
1 | 位移 | ±45 deg(机械限位最大可调至±55°) |
2 | 最大速度 | 500 deg/s |
3 | 最大额定输出扭距(>30Min) | 300Nm |
4 | 最大输出扭距(<30 Sec) | 340Nm |
5 | 最大输出峰值扭距 | 400Nm |
6 | 外形尺寸(估计) | 495x210x253mm |
7 | 重量 | 29kg |
8 | 用电及功率 | 220 V/50 Hz最大功率1000 W,平均320 W |
XR混合现实系统:
模块 | 类别 | 参数 | |
整机 |
类型 | 型号 | KM01 |
类型 | PC XR | ||
外观 | 外观 | 泳镜式外观 | |
尺寸 | 170*90*53mm | ||
重量 | 低至 380g(绑带式) | ||
穿戴 | 佩戴 | 可收纳头箍方式轻便绑带式可兼容 | |
散热 | 双风扇散热 | ||
光学显示系统 |
屏幕 | 类型 | MicroOLED*2 |
分辨率 | 3840*3552 | ||
刷新率 | 90Hz | ||
色域 | DCI-P3 93% | ||
光学 | 类型 | Pancake | |
FOV | 水平 110°, 竖直 95° | ||
亮度 | > 120 nits | ||
IPD 瞳距调节 | 范围 | 56-72mm | |
方式 | 算法自动调节/PC 输入调节 | ||
精度 | ±0.2mm | ||
透视系统 | VST 空间透视 | 摄像头 | 双全彩 64M |
硬件 | 国产 FPGA | ||
ISP | 自研 ISP 算法可定制 | ||
感知交互系统 | SLAM 空间定位 | 摄像头 | 4 专用黑白摄像头 |
IMU | 2 专用高速 IMU | ||
关键参数 | 毫米级重定位精度, 亚毫米级相对平均误差 RTE | ||
ET 眼球追踪 | 摄像头 | 4 专用眼球追踪摄像头 | |
补光灯 | 单眼 12 红外补光灯 | ||
关键参数 | 准确度 1.48°, 精确度 0.56° | ||

引擎内置集成混合现实眼镜驱动和扩展接口,对于市面上常见的支持OpenXR接口的混合现实眼镜可直接接入使用;同时提供扩展接口,通过简单编程可轻松的接入新的眼镜产品,实现了从硬件到软件全国产化解决方案。
产品咨询
相关产品
在数字化浪潮席卷各行业的今天,北京赛四达科技股份有限公司推出的 AI 智能讲解终端—— 数字人讲解系统,以前沿科技重塑信息交互体验,为展馆、企业展厅、教育、文旅等领域带来全新的智能化服务方案。
三通道折幕显示系统采用三个100”可拆卸式背投箱体呈130度夹角组合而成,构成一个平面折幕三通道投影系统。系统主要包括三台Barco F22 sx+ 1400x1050 DLP投影机,100” Dark背投硬幕和可拆卸式背投箱体组成。每个箱体屏幕尺寸为100英寸,夹角可根据座舱的尺寸与显示系统的设计任意调整。 本系统调整为水平夹角130度,箱体间接缝的宽度最小可达2mm,系统总分辨率高达4200x1050像素。视场角170°。投影机亮度最高可达3300ANSI流明,屏幕增益3.5,半增益角40度。
Image Composer为图像生成系统和投影机提供连续的无延迟、无变形的图像数字传输。采用先进的数字滤波技术大大减少了由将像素点映射到不同位置所引起的图像锯齿现象。多通道投影中,将图像投影到新的位置,人眼所看到的就是无重叠的图像了。
北京赛四达科技股份有限公司
Shanxi Huidawei Electronic Technology Co., Ltd